22-07-2026 13:18:15 pm
বিজ্ঞান - Bigyan
বাংলা ভাষায় বিজ্ঞান জনপ্রিয়করণের এক বৈদ্যুতিন মাধ্যম
An online Bengali Popular Science magazine
https://bigyan.org.in
বিশৃঙ্খলার গতিবিদ্যা
Link: https://bigyan.org.in/uncertainty-in-dynamics
আবহাওয়ার পূর্বাভাস তো অঙ্ক কষেই দেওয়া হয়। এ কেমনধারা অঙ্ক যেখানে কোনো নিশ্চয়তা নেই?
আমাদের ছোটবেলায় আবহাওয়া অফিসে যাঁরা কাজ করতেন, তাদের নিয়ে ঠাট্টা তামাশার অন্ত ছিল না। রেডিওতে (যন্ত্রটি আজকাল আর দেখা যায় না) যেই শোনা যেত “আবহাওয়ার পূর্বাভাস বলা হচ্ছে …”, অনেক শ্রোতা রেডিও বন্ধ করে দিতেন অথবা খোলা রাখতেন মন্তব্য করার জন্য। “গাঁজায় দম দিয়ে এসেছেন”, “এখানকার আবহাওয়াটা ওর মাথার জন্য ভালো নয়”, ইত্যাদি শুনতে খুব মজাই লাগতো। অর্ধ শতকেরও বেশি পরে বুঝতে পেরেছি তাদের কোনো দোষ ছিল না। তাদের দেওয়া হয়েছিল তখনকার দিনের একটা প্রায় অসম্ভব কাজ। তাঁদের কাজটা কেন এত কঠিন ছিল, সেটাই এই লেখায় বোঝানোর চেষ্টা করবো।
নিউটনের সূত্রের সমীকরণ
ধরা যাক, আমি 


সমীকরণের শেষে রয়েছে নুড়িটির ওপর মাধ্যাকর্ষণ বল। বলের সাথে মাইনাস চিহ্ন দেওয়া হলো কারণ আমাদের কোঅর্ডিনেট সিস্টেম (coordinate system) এমন যে আমার থেকে নুড়ির দূরত্ব (
 = v(0) - gt")
 = v(0)t - \frac{1}{2} gt^2 + z(0)")
যেখান থেকে নুড়িটি ছোঁড়া হলো, সেই বিন্দুটিকে কোঅর্ডিনেট সিস্টেম-এর মূলবিন্দু  = 0")
 = 980cm/s")
 = 980 - gt")
 = 980t - \frac{1}{2} gt^2")
নুড়িটি ততক্ষণ উপরে উঠবে যতক্ষণ না তার গতিবেগ শূন্য হয়ে যাচ্ছে। আমরা জানি 



গতিবেগ শূন্য হয়ে গেলে সে মাধ্যাকর্ষণের জন্য নেমে আসতে শুরু করবে। এখনো ")
")
= 490cm")
= 0")
= 0")

যার থেকে পাই

আমি ছুঁড়ে দেওয়ার 

শুরুর মাপের ভুলচুকে সমীকরণের প্রভাব
আমি ইচ্ছে করে নুড়িটি 






ধরা যাক নুড়িটির ওপরে ওঠা এবং নীচে নামাটা নিউটনের দ্বিতীয় সূত্রের সমীকরণের পরিবর্তে এমন কোনো সমীকরণ দিয়ে বর্ণিত হত যার জন্য সামান্য ভুলের মাশুল সামান্য নয়। এমন যদি হত যে 

আমাদের সৌভাগ্য যে নুড়ির জন্য যে গতিসূত্র, অর্থাৎ নিউটনের দ্বিতীয় সূত্র, তাতে এই ধরণের কোনো সমস্যা নেই। কিন্তু বায়ুমণ্ডলের যে গতি-সংক্রান্ত সমীকরণ, অর্থাৎ হাওয়ার দ্রুতি, বায়ুচাপ, আর্দ্রতা ইত্যাদির সময়ের সাথে পরিবর্তন বর্ণনা করার জন্য যে “নিউটনের সূত্র” প্রযোজ্য, সেগুলো ব্যবহার করলে এই দুর্ভোগের সম্মুখীন হতে হয়। এই কারণে আজ থেকে চল্লিশ পঞ্চাশ বছর আগে আবহাওয়াবিদদের কাজটা ছিল প্রায় অসম্ভব। কারণ অবকল সমীকরণগুলোর এই ধর্মটা — শুরুর মানগুলোতে সামান্য ভুল থাকলেও আখেরে ভুলের পরিমাণ বিশাল হয়ে যায় অর্থাৎ কিনা সমীকরণের সমাধানটা ভয়ঙ্করভাবে শুরুর মানগুলোর উপর নির্ভরশীল। একে বলে প্রাথমিক পরিস্থিতির উপর অতিনির্ভরশীলতা (sensitivity to initial conditions)। এই লেখার বাকি অংশে আমার কাজ হবে একটি অত্যন্ত সহজ উদাহরণের সাহায্যে বুঝিয়ে দেওয়া কিভাবে এই প্রাথমিক পরিস্থিতির উপর অতিনির্ভরশীলতার সৃষ্টি হতে পারে।
প্রাথমিক পরিস্থিতির উপর অতিনির্ভরশীলতার উদাহরণ
চলাফেরার বর্ণনা অবকল সমীকরণ দিয়ে না করে একটু অন্যরকম ভাবে করলে ব্যাপারটা বোঝাতে সুবিধে হবে। এই “অন্যরকম” বর্ণনার আবিষ্কারক অঁরি পোঁয়াকারে (Henri Poincare)। মহাকাশে তিন-চার বা ততোধিক গ্রহতারার চলাফেরার বিশ্লেষণ করতে গিয়ে ১৮৯০ নাগাদ পোঁয়াকারে দেখলেন যে সরাসরি নিউটনের সূত্র লেখা দুরূহ – তাই ঐ দশকে তিনি বার করলেন এক নতুন পদ্ধতি যাকে বলে পোঁয়াকারে ম্যাপ (Poincare map)। ধরা যাক একটা সমতলের (
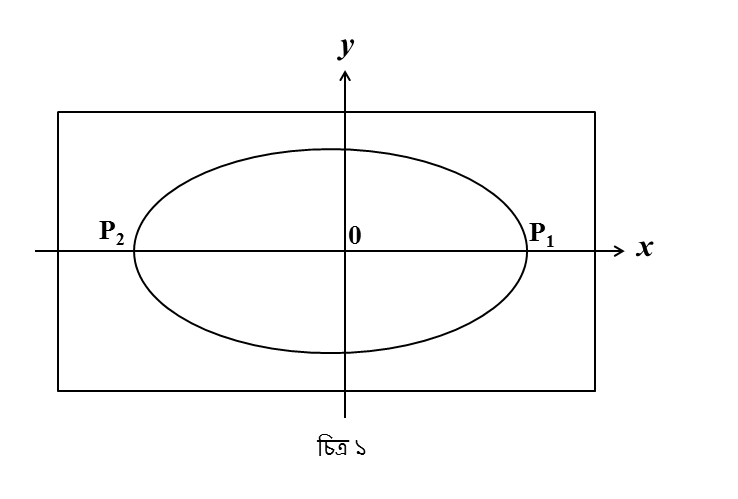
আমাদের পৃথিবী যেমন সূর্যের চারিদিকে একটি উপবৃত্তাকার গতিপথে ঘুরপাক খায়, ঐ কণার গতিপথ যদি সেইরকম হত (চিত্র ১) এবং চিত্রে পূর্বোক্ত সরলরেখাটা যদি হয় 


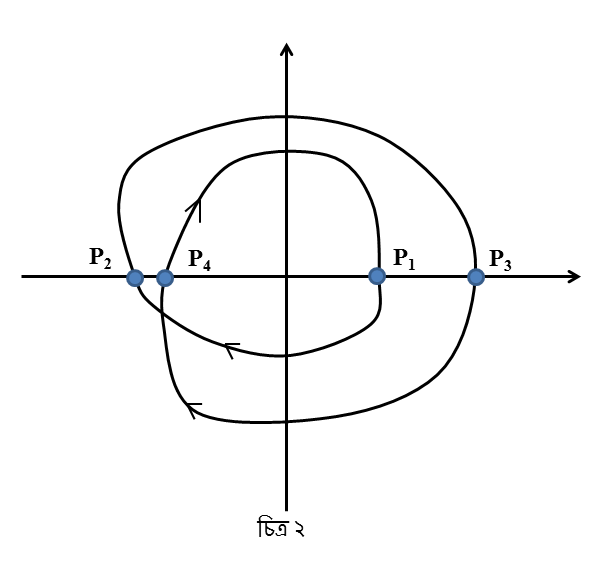
যদি উপবৃত্ত না হয়ে গতিপথটা হত আরও গোলমেলে, যেমন চিত্র ২-এ দেখানো হয়েছে, সেরকম হলে আমি চারটে বিন্দু 
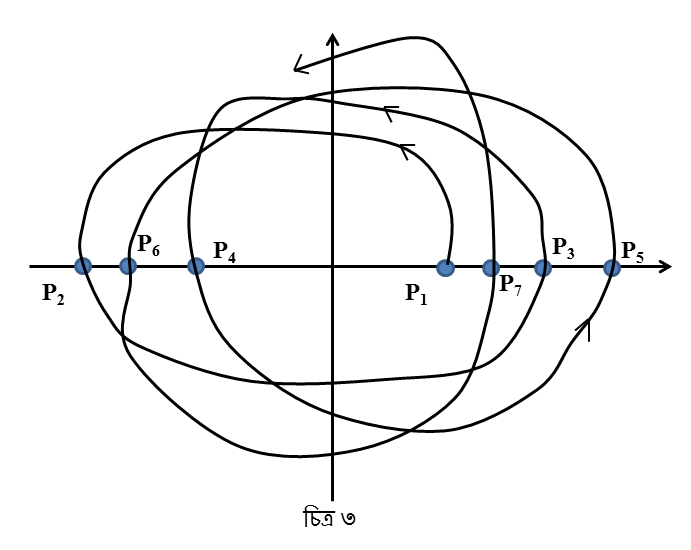
আর যদি এমন হয় যে কক্ষপথ আরও অনেক বেশি অচেনা যেমন চিত্র ৩-এ দেখানো আছে, তাহলে দেখব পরপর কিছু বিন্দু 
প্রথম বিন্দু 

")
একেই বলে পোঁয়াকারে ম্যাপ। পোঁয়াকারে বললেন যে আমি যদি সাধারণ সূত্রের সাহায্যে ")




এর মান কখনো এক-এর বেশি হতে পারেনা, অর্থাৎ 
")

এইবার আমরা আলোচনাটাকে আরেকটু ফোকাস করতে
= rX(1-X)")
উপরোক্ত সমীকরণে 
 \leq 1")
")


= rX_n(1-X_n)")
ফিক্সড পয়েন্ট বা স্থির বিন্দু
আমরা প্রথম ছবিটিতে দেখেছিলাম, পৃথিবীর কক্ষপথ এমন যে 
= X_n")
")
এই সমীকরণটির সাহায্যে। লজিস্টিক ম্যাপ-এর ক্ষেত্রে = rX^*(1-X^*)")


এইবার প্রথম ছবিটা দেখা যাক। পৃথিবীর সূর্য প্রদক্ষিণের কক্ষপথ বারবার 

ফিক্সড পয়েন্ট থাকাই কিন্তু যথেষ্ট নয়। গতি শুরু হওয়ার সাথে সাথেই তো কেউ ফিক্সড পয়েন্ট-এ বসে থাকবে না। সময়ের সাথে ফিক্সড পয়েন্ট-এ পৌঁছবে। অতএব প্রশ্ন হলো: কোথাও একটা শুরু করিয়ে দিলে ফিক্সড পয়েন্ট-এ পৌঁছে যাবে কি?
এর উত্তর পাওয়ার জন্য দেখা হয় ফিক্সড পয়েন্ট কাছাকাছি 





আগের সমীকরণগুলোর সাহায্যে লেখা যায়:
= f(X^* + \delta X_n)= f(X^*) + \delta X_n \frac{df}{dX}|_{X^*} + \cdots")
ওপরের টেলর এক্সপ্যানশন (Taylor expansion)-এ ^2")


এবং স্টেবল ফিক্সড পয়েন্ট –এর জন্য চাই:

এইবার দেখা যাক 
= 2-r")
স্টেবিলিটির জন্য চাই 



একাধিক ফিক্সড পয়েন্ট-এর মধ্যে চরকিপাক
চিত্র ২-তে যে কক্ষপথটি দেখলাম, সেটি কি লজিস্টিক ম্যাপ-এর সাহায্যে পেতে পারব? এই কক্ষপথের বিশেষত্ব দুটি বিন্দু (



গতিপথ
")
")
এর থেকে সহজেই দেখতে পাই:
=f(f(X^*_1))")
=f(f(X^*_2))")
অতএব 
)")
লজিস্টিক ম্যাপের জন্য = rX(1-X)")
![f(f(X))= rf(1-f)=r^2 X(1-X)[1-rX(1-X)]](https://s0.wp.com/latex.php?latex=f%28f%28X%29%29%3D+rf%281-f%29%3Dr%5E2+X%281-X%29%5B1-rX%281-X%29%5D&bg=ffffff&fg=000080&s=2 "f(f(X))= rf(1-f)=r^2 X(1-X)[1-rX(1-X)]")
এই অপেক্ষকটির ফিক্সড পয়েন্ট
![X^*=r^2 X^* (1-X^* )[1-rX^* (1-X^*)]](https://s0.wp.com/latex.php?latex=X%5E%2A%3Dr%5E2+X%5E%2A+%281-X%5E%2A+%29%5B1-rX%5E%2A+%281-X%5E%2A%29%5D&bg=ffffff&fg=000080&s=2 "X^*=r^2 X^* (1-X^* )[1-rX^* (1-X^*)]")
পরিষ্কার দেখা যাচ্ছে উপরোক্ত দ্বিঘাত সমীকরণের দুটি সমাধান 





শুরুর অল্প তফাৎ যখন চটজলদি বেড়ে যায়
এইবার আমরা দেখতে চাই লজিস্টিক ম্যাপ কি কখনো এমন একটি কক্ষপথ 

")
একটা রূপান্তর (transformation) করা যাক:


রূপান্তরটা করলে দাঁড়ায়:

যার থেকে পাই


যদি বলি 

এবং

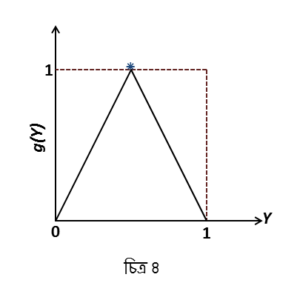
, \frac{1}{2} \leq Y_n \leq 1")
এই ম্যাপটি যাকে আমরা লিখব:
")
একে বলা হয় টেন্ট ম্যাপ (tent map) কারণ এর গ্রাফ হচ্ছে এইরকম তাঁবুর মতো:
এবার প্রশ্ন, আমি যদি 
")
তারপর
= g(g(Y_0))")
তারপর
= g(g(g(Y_0)))")
তারপর
 \cdots))")
উত্তরটা জানতে হলে আঁকতে হবে ), g(g(g(Y)))")
)")
")
))")
")
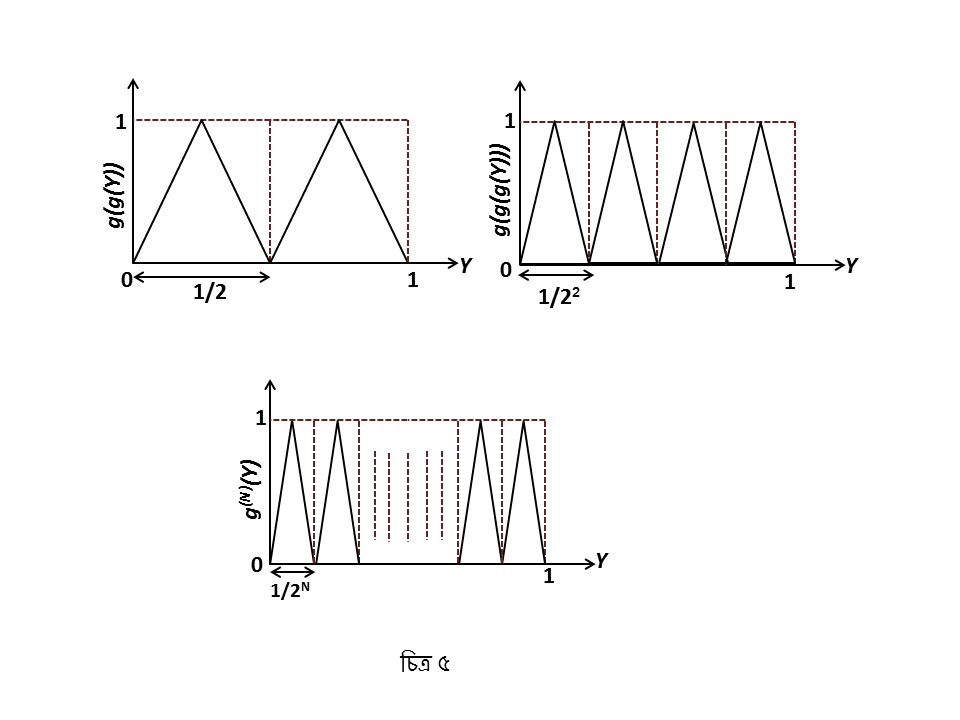
উপরের ছবিগুলোর সাহায্যে দেখা যাচ্ছে



যদি 

অতএব কণাটির অবস্থার বিবর্তন যদি হয় ")






ধরা যাক, শুরুর তফাৎ-টা আরো ছোট:


তাহলে দশটা ধাপ পরে 







")
এই লিয়াপুনভ ইনডেক্স যদি ধনাত্মক হয়, তাহলে কণাটির চলন প্রাথমিক অবস্থার উপর অতিনির্ভরশীল বা কেওটিক (chaotic) হবে। যে বিষয়ে এই ধরণের কেওটিক চলন অন্তর্ভুক্ত তাকে কেয়স (chaos) বলে। আমরা যে টেন্ট ম্যাপটি দেখলাম, তার জন্য যদি

তাহলে 
 > 0")
এইবার ফিরে আসা যাক আবহাওয়ার পূর্বাভাস সম্বন্ধে। হাওয়ার গতিবেগের জন্য নিউটনের সূত্র লিখলে তার থেকে যে পোঁয়াকারে ম্যাপ বেরোবে, সেটা আমাদের টেন্ট ম্যাপ-এর মতন সহজ না হলেও, টেন্ট ম্যাপের যে বিশেষত্ব আসে, বায়ুমণ্ডলেও প্রায়শঃই সেই বিশেষত্ব থাকে। আবহাওয়া সম্বন্ধে সঠিক পূর্বাভাসের জন্যে প্রথমেই প্রয়োজন চারদিকের বায়ুর গতিবেগ ও বায়ুচাপ সম্বন্ধে প্রায় নির্ভুল জ্ঞান এবং দ্বিতীয়ত প্রয়োজন উচ্চমানের গণনার সুব্যবস্থা। এই দুটি হলে পরেও কেওটিক চলনের ফলে পূর্বাভাসে ভুলভ্রান্তি হতে পারে। আজ থেকে পঞ্চাশ বছর আগে আমাদের দেশে কেন হয়তো গোটা পৃথিবীতেই ভালো বায়ুমণ্ডল-সংক্রান্ত তথ্য জোগাড় করা অত্যন্ত কঠিন ছিল। আজকে উচ্চমানের কৃত্রিম উপগ্রহের কল্যাণে এ ব্যাপারে ততটা সমস্যা নেই, সুপারকম্পিউটারও সর্বত্র। তাই আজকের আওহাওয়াবিদদের জীবন অনেক সহজ। কিন্তু তবুও দেখবে কালকের আবহাওয়ার পূর্বাভাস যতটা বিশ্বাসযোগ্য, দুই তিন দিনের বেশি হয়ে গেলে ততটা নয়। সেখানে এখনো কেওটিক চলনের অনিশ্চয়তা তার ছাপ রেখে যায়।
লেখাটি অনলাইন পড়তে হলে নিচের কোডটি স্ক্যান করো।
Scan the above code to read the post online.
Link: https://bigyan.org.in/uncertainty-in-dynamics