02-08-2026 22:16:18 pm
বিজ্ঞান - Bigyan
বাংলা ভাষায় বিজ্ঞান জনপ্রিয়করণের এক বৈদ্যুতিন মাধ্যম
An online Bengali Popular Science magazine
https://bigyan.org.in
অরিগামি রোবট
Link: https://bigyan.org.in/origami-robot

ছোটবেলায় সেই প্রথম কাগজের নৌকো বানানোর অভিজ্ঞতার কথা মনে পড়ে? একটা সাদা কাগজ ভাঁজ করতে করতে একসময় হঠাৎই একটা আস্ত নৌকো বেরিয়ে এলো। সেটাকে জলে ছেড়ে দিলে, না ডুবে না উল্টে দিব্যি জলে ভেসে থাকতে পারে, এমনকি কিছুদূর এগোতেও পারে। কিংবা কাগজের এরোপ্লেন? ছুঁচোলো মুখ, ছুঁড়লে বেশ কিছুটা দূর যেতে পারে। ছোটবেলায় এগুলো কেউ বানিয়ে দিলে প্রায় ম্যাজিকের মত লাগতো। ছিল একটা চ্যাপ্টা কাগজ, হয়ে গেল এমন একটা জিনিস যেটা চলতে পারে। এই হয়ে যাওয়াটা যদি আপনা আপনি হয়, তখন বোধহয় আর ছোটবেলার ম্যাজিক থাকবে না, প্রাপ্তবয়স্কদের কাছেও ম্যাজিক বলেই মনে হবে।
কিন্তু এই ম্যাজিক-ই করে দেখিয়েছিলেন ম্যাসাচুসেটস ইনস্টিটিউট অফ টেকনোলজি-র এক গবেষকদল [১]। তাদের ‘অরিগামি রোবট’-এর মাধ্যমে। কাগজ না কেটে শুধু ভাঁজ করে বিভিন্নরকম জিনিস বানানোর-ই গালভরা নাম অরিগামি (origami)। “অরি” (ori) অর্থ ভাঁজ আর “কামি” (kami) অর্থ পেপার বা কাগজ। পরবর্তীকালে এটাই পরিবর্তিত হয়ে অরিগামি (Origami) হয়েছে।
যেটা ছিল শখের জিনিস, সেটাই এখন ইঞ্জিনিয়ারিং এও কাজে লাগছে। MIT-র গবেষক ড্যানিয়েলা রুস-এর ল্যাবে এই অরিগামির সূত্র ব্যবহার করেই একটা দ্বিমাত্রিক (2D) কাগজ থেকে একটা ত্রিমাত্রিক (3D) রোবট বানানো হয়েছে। খালি কাগজের ভাঁজগুলো হচ্ছে আপনা থেকেই, কেউ হাতে করে সেগুলো করে দেয়নি।
নিচে এই রোবটটার ছবি দেওয়া হলো। এটা দিব্যি গুটি গুটি পায়ে হাঁটতে পারে এবং তৈরি হয়েছে সম্পূর্ণ নিজে থেকে।

কিন্তু কিভাবে এটা সম্ভব হলো?
সবথেকে সরল ভাঁজ
অরিগামি শিখতে গেলে প্রথমেই যে দুটো ভাঁজ শিখতে হবে সেগুলো হলো পাহাড়ের মত ভাঁজ (mountain fold) আর উপত্যকার মত ভাঁজ (valley fold)। উপত্যকার মতো ভাঁজটা এরকম দেখতে:
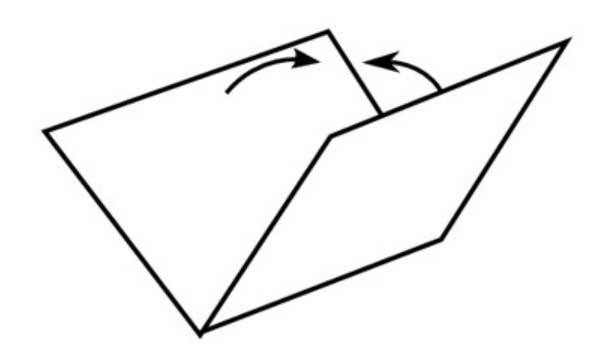
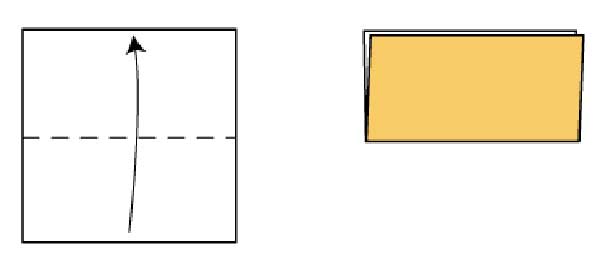
কাগজটার দু’ধার তুলে ঠিক মাঝে একটা উপত্যকার সৃষ্টি হচ্ছে। অরিগামি শেখানোর বইতে এই ভাঁজটা ড্যাশ দিয়ে দেখানো হয়:
পাহাড়ের মত ভাঁজটা ঠিক এর উল্টো। কাগজের দুধার-টা নিজের দিকে না এনে উল্টো দিকে ভাঁজ করলে একটা পাহাড় তৈরি হবে।
এরকম বেশ কয়েকটা ভাঁজ ঠিকমতো করলে দেখবে কাগজটা আস্তে আস্তে একটা আকৃতি ধারণ করছে এবং যেরকমটা চাইছো, হয়ে যাচ্ছে। যেমন নিচে দেওয়া হলো একটা অরিগামি পাখি:
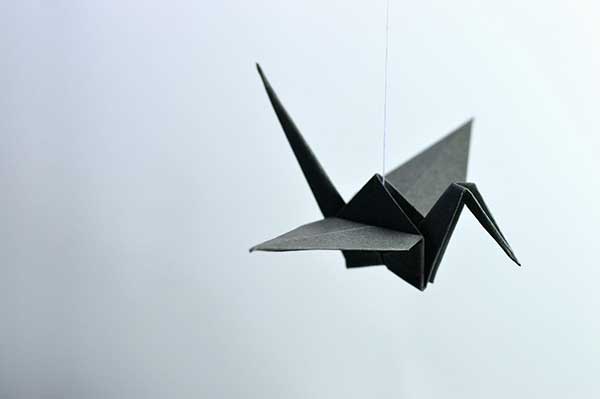
অনেকগুলো ভাঁজ করে আর ভাঁজ খুলে এটা তৈরি হয়েছে।
যদি এই একেকটা ভাঁজ নিজে থেকে হয়ে যায়, তাহলেই একসময় শেষের পাখি কিংবা রোবট-টাও বেরিয়ে আসবে। গবেষকরা সেটাই করলেন।
নিজে থেকে ভাঁজ হয় কিভাবে
গবেষকরা কাগজের পরিবর্তে যে দ্বিমাত্রিক (2D) জিনিসটা ব্যবহার করলেন, সেটা হলো একটা বিশেষ পলিমার-এর (polymer) স্তর। সেই পলিমারটাকে গরম করলে সেটার সবদিক থেকে সংকোচন হয়। তবে এই স্তর-টা রয়েছে মধ্যিখানে, উপরে আর নিচে রয়েছে আরেকটা স্তর যার গরমে সংকোচন-প্রসারণ কিছুই হয়না। এই স্তরগুলো একধরণের কাগজের তৈরি।
ওনাদের গবেষণাপত্র থেকে এই স্তরগুলোর ছবি দেওয়া হলো:
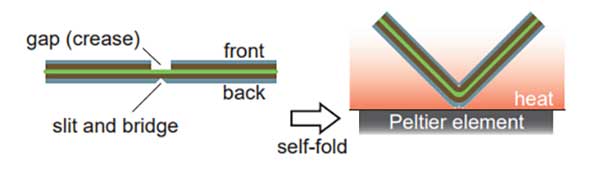
লক্ষ্য করে দেখবে, মাঝের পলিমার-এর স্তরটার সাথে উপরের আর নিচের স্তরটা সবজায়গাতে আঁটা নেই। উপরে নিচে দুজায়গাতেই একটু ফাঁক আছে। উপরের ফাঁকটা অপেক্ষাকৃত বড়।
গরম করলে মাঝের স্তরটা সংকুচিত হওয়ার চেষ্টা করে। উপরের আর নিচের স্তরটা মাঝের স্তরের সাথে এঁটে থাকার ফলে সেই সংকোচনে বাধা দেয়। শুধু ওই ফাঁকগুলোতে বাধা দিতে পারে না। উপরের ফাঁকটা বেশি হওয়ার ফলে উপরে সংকোচন বেশি হয়, নিচে কিছুটা কম।
এই সংকোচনের তফাতের কারণে গোটা জিনিসটা দুধার থেকে উপরের দিকে উঠে যায়। ব্যাস, হয়ে গেলো উপত্যকার মত ভাঁজ!
এটাই অরিগামি রোবটের মূল নীতি। শুরু হয় একটা চ্যাপ্টা জিনিস থেকে, তাতে রয়েছে তিনটে স্তর। যেখানে যেখানে ভাঁজের প্রয়োজন, সেখানে সেখানে উপরের আর নিচের স্তরে প্রয়োজনমতো ফাঁক কেটে দেওয়া আছে। এরপর শুধু গরম করার পালা। কাগজের ভাঁজগুলো আপনা আপনি হতে থাকে। (একটা Peltier element-এর ব্যবহার করা হয় গরম করতে। Peltier element-এ ভোল্টেজ-এর তফাৎ তৈরি করলে সেখান থেকে তাপ নিঃসৃত হয়।)
এখন প্রশ্ন হলো: রোবট-টা যদি শুধু কাগজই হয়, তাহলে চলে কি করে?
রোবটটা কিভাবে চলে
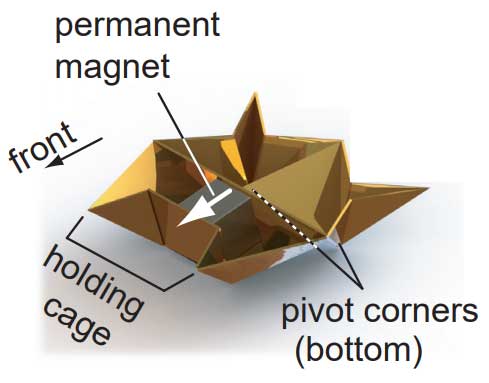
কাগজ ভাঁজ হয়ে যে জিনিসটা তৈরি হয়, সেটার একটা “সামনের” আর “পিছনের” দিক রয়েছে। যেদিকে এগোয়, সেটা সামনের দিক। আর পিছনের দিকে দু’টো পায়ের মতো সরু জিনিস রয়েছে।
চলার সময় সেই পা দু’টো শূন্যে উঠে যায়। এই ভিডিওটাতে রোবটটার চলা দেখতে পাবে। তবে সেটা খুব তাড়াতাড়ি হচ্ছে। পিছনের পা দু’টো একটু উঠছে আবার নামছে, কিন্তু আগের জায়গাতে নামছে না, সামান্য এগিয়ে নামছে।
রোবটটা নিজে থেকে চলে না অবশ্যই। ওটাকে পরিচালনা করা হয় একটা চৌম্বকক্ষেত্রের (magentic field) সাহায্যে। রোবটটাতে ওই তিনটে স্তর ছাড়াও একটা চুম্বক আটকানো আছে সামনের দিকে। ছবিতে চুম্বকটা দেখতে পাবে। চৌম্বকক্ষেত্রের কারণে চুম্বকটার উপর একটা টর্ক (torque) সৃষ্টি হয়, যেটা চুম্বকটাকে ঘোরানোর চেষ্টা করে। চুম্বকটা টর্ক-এর কারণে ওঠানামা করে, সাথে সাথে বাকি রোবটটাকেও চালায়।
রোবটের এইপ্রকার চলনকে বলে stick-slip motion। এটা কিভাবে হচ্ছে, আরেকটু গভীরে গিয়ে বোঝা যাক। রোবটের চলাটা সাইড থেকে দেখলে কিছুটা এরকম (রোবটের গঠনের জটিলতা ভুলে শুধু একটা দুপেয়ে কাঠি হিসেবে দেখানো হচ্ছে):
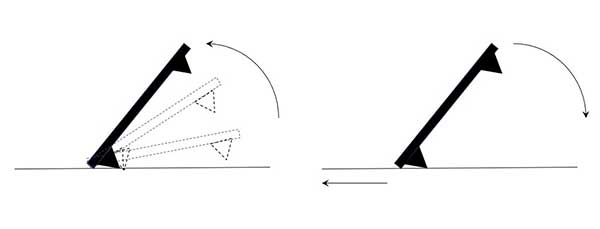
চৌম্বকক্ষেত্রটা সময়ের সাথে স্থির নয়। সেটা সেকেন্ডে চারবার দিশা পাল্টায়, আবার ফিরে আসে শুরুর দিশায়। প্রথম তিনটে দিশায় চুম্বকটার উপর এমন একটা টর্ক (torque) কাজ করে যে, চুম্বকটা এবং সাথে সাথে গোটা রোবটটা সামনের দিকে একটু ঝুঁকে পিছনের পা দু’টো উপরে তুলে দেয়। কিন্তু ঘর্ষণের কারণে রোবটের যেখানটা মাটিতে ঠেকে আছে, সেটা পিছিয়ে যায় না [৩]। এটাই stick অবস্থা, অর্থাৎ সামনেটা মেঝেতে এঁটে আছে, খালি পিছনটা উঠে গেছে।
চতুর্থ দিশাটা এমন হয় যে টর্ক-টা ঠিক উল্টো দিকে কাজ করে এবং টর্ক-টা হয়ও অনেকটা বেশি। এবার রোবটটা পা দু’টোকে নামিয়ে দেয়। কিন্তু, নামার সময় গোটা রোবটটাই সামান্য একটু ঘষটে এগিয়ে যায়। টর্ক বেশি হওয়ার ফলে, মেঝেতে যেখানটা লেগে আছে, সেখানে এগোনোর একটা বিপুল প্রবণতা তৈরি হয়। ঘর্ষণ আর এই এগিয়ে যাওয়াটা আটকাতে পারেনা। সামনেটা একটু ঘষটে এগিয়ে যায় আর পা দু’টো তাই ঠিক আগের জায়গায় নামে না, আরেকটু এগিয়ে নামে। এটাই slip অবস্থা, অর্থাৎ রোবটটা একটু ঘষটে বা পিছলে এগিয়ে গেছে।
এই ঘষটে এগোনোটা বুঝতে চাইলে তুমি খুব আস্তে করে যেকোনো একটা লম্বা জিনিসকে একধার ধরে তোলো, দিয়ে ছেড়ে দাও। দেখবে পড়ার সময় সামনের দিকটা একটু স্লিপ খেয়ে এগিয়ে যাচ্ছে।
তাহলে দাঁড়ালো এই যে প্রত্যেক পা ওঠানো-নামানোর শেষে রোবটটা সামান্য একটু ঘষটে এগোয়। এইটাই খুব তাড়াতাড়ি করতে করতে রোবট বাবাজী যেখানে ইচ্ছে পৌঁছে যেতে পারে।
অরিগামি রোবটের প্রয়োগ
এই কাজটা হয়েছিল ২০১৫-তে। ড্যানিয়েলা রুস-এর ল্যাবে এর পর আরো অনেকরকমের অরিগামি রোবট বানানো হয়েছে।
এই রোবটগুলো ছোটোখাটো হওয়ার ফলে এমন জায়গাতে ঢুকতে পারে যেখানে সাধারণ মানুষে ঢুকতে পারবে না। ড্যানিয়েলা রুস স্বপ্ন দেখছেন এমন রোবটের যেটা এমনকি দেহের ভিতরেও ঢুকে যেতে পারবে। ফলে এই একই গবেষণাপত্রে তিনি এটাও দেখিয়েছেন কিভাবে রোবটটাকে কাজশেষে তরলে একদম ভ্যানিশ করিয়ে দেওয়া যায়। অর্থাৎ, ধারণাটা এইরকম যে রোবট দেহের ভিতর যেখানে প্রয়োজন যাবে, যা সারাই করার করে দেবে, দিয়ে সেখানেই দেহের কোনো তরলে মিলিয়ে যাবে।
যদিও এতদূর যেতে এখনো দেরি আছে, চটজলদি রোবট বানানোর প্রযুক্তিতে নিঃসন্দেহে এই অরিগামি রোবট একটা বড় অবদান। যেহেতু বিভন্ন কাজের জন্য রোবটের প্রয়োজন বাড়ছে, তাই সস্তায় চটচলদি রোবট তৈরির চাহিদাও বাড়ছে। সেই চাহিদা মেটাতে এই ধরণের প্রযুক্তির কথা ভাবতে হচ্ছে। রোবট তৈরি করা যে একটা বিপুল কর্মকাণ্ড, অনেকগুলো ইলেকট্রনিক অংশ ঠিকভাবে জুড়ে সেটা করতে হয়, এই ধারণাতে সীমিত থাকলে আর চলছে না। MIT-র গবেষকদল এই ধারণা থেকে বেরোনোর একটা সহজ উপায় দেখালেন।
তথ্যসূত্র:
[১] মূল গবেষণাপত্র-টা এখানে দেওয়া হলো : https://dspace.mit.edu/bitstream/handle/1721.1/97147/ICRA2015v26Final.pdf?sequence=1&isAllowed=y । গবেষণাপত্র থেকে ছবি পুনঃপ্রকাশের অনুমতির জন্য আমরা MIT-র Computer Science and Artificial Intelligence Laboratory-র কাছে কৃতজ্ঞ।
[২] গবেষণাপত্র নিয়ে MIT News-এ জনসাধারণের জন্য প্রচার এখানে দেওয়া হলো: https://news.mit.edu/2015/centimeter-long-origami-robot-0612 । রোবটের ছবিটাও সেখান থেকে সংগৃহীত।
[৩] শুধু টর্ক থাকলে সেটার কাজ হলো একটা জিনিসকে ঘোরানো। ঘর্ষণ না থাকলে, যেমন মাঝে আটকানো একটা জিনিস হাওয়ায় ভেসে থাকলে, একটা টর্ক-এর কারণে একদিকটা এগোলে অন্য দিকটাকে একটু পিছোতে হয় (যাতে ভরের কেন্দ্রবিন্দু একই জায়গাতে থাকে)। কিন্তু, ঘর্ষণের কারণে ওই পিছিয়ে যাওয়াতে বাধা পড়ে।
লেখাটি অনলাইন পড়তে হলে নিচের কোডটি স্ক্যান করো।
Scan the above code to read the post online.
Link: https://bigyan.org.in/origami-robot